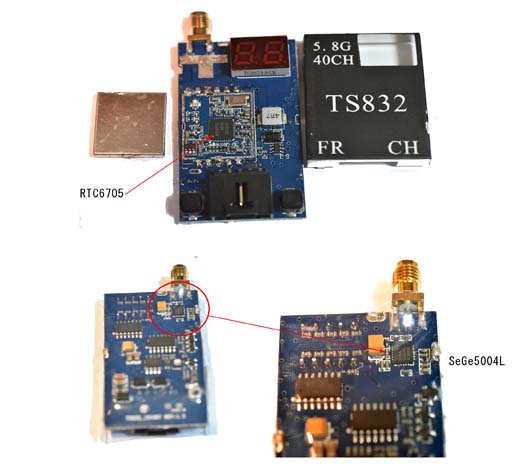
(1)jjrc H8DHカメラ&モニターを調べたところ、チップがRTC6705とRX5802だったため、
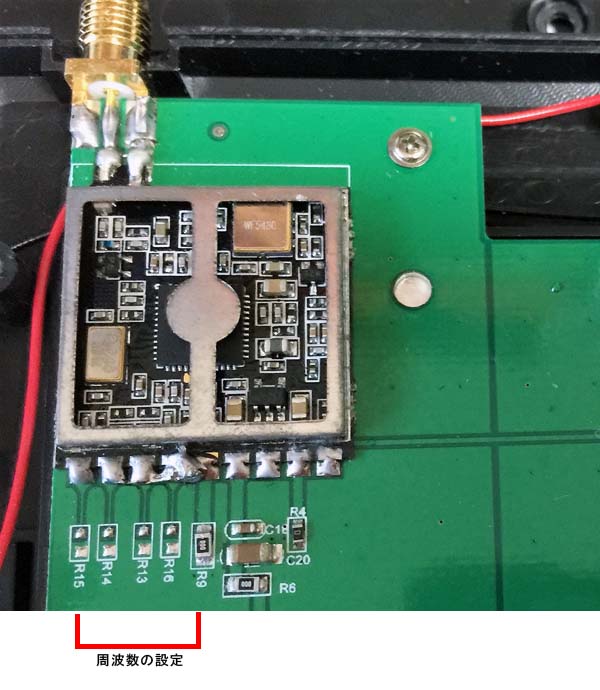
チャンネルを日本で使用できる5600MHz帯の1つに固定して(はんだ付けして)テスト
したところ、ぴったし!GooDである。モニターは使えそうです。
TS832送信機からの受信もOKでした。
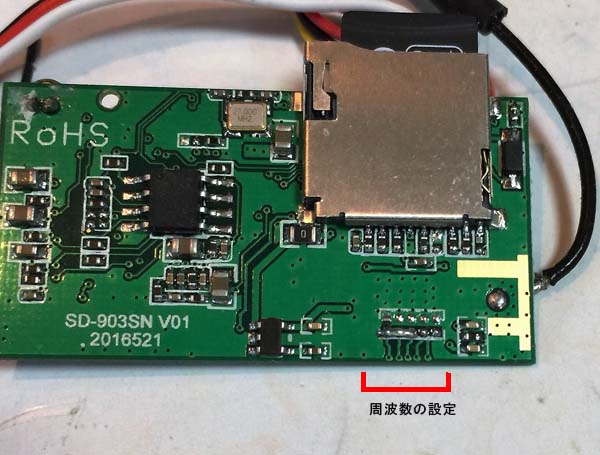
受信側モニター内部の画像
inspire1にフロントカメラを付ける
inspire2が発売されてフロントカメラを付けて見たくなった。--------- まとめ ------------------------------------------------------------
① 受信機(モニター):
(1)「jjrc H8DH」のモニター :手持ちの200g以下ドローンのモニター使用
(2)「Feelworld PVR733 7" Wireless 5.8G」の画面が明るく録画出来るモニターを海外から入手
② AV用送信機:使用するのは1つであるが許可申請は3つしておく
(1)Boscam FPV 5.8G 32CH 600mw 無線 AV 送信機 TS832
(2)Boscam FPV 5.8G 40CH 600mw 無線 AV 送信機 TS832
(3)Boscam FPV 5.8G 48CH 200mw 無線 AV 送信機 TS5823
③ カメラ:170度と90度の2つの取り付けてスイッチで切り換える
(1)Threeking 600TVL NTSC スーパーCCD 1.8mmレンズ FPVカメラ 170度広角
(2)Runcam Swift 600TVL 90度 広角 FPV カメラ
④ OSDボード:無線局名をモニターに表示する
(1)"Micro MinimOSD"
⑤ OSD設定用:PCとOSDとの接続用(USB-シリアル変換)
(1)FT232RL USB to 5V/3.3V TTLシリアル変換モジュール
⑥ OSD表示データ(各センサー):機体の傾きや方位等を表示
(1)Naze32 10DOFフライトコントローラー
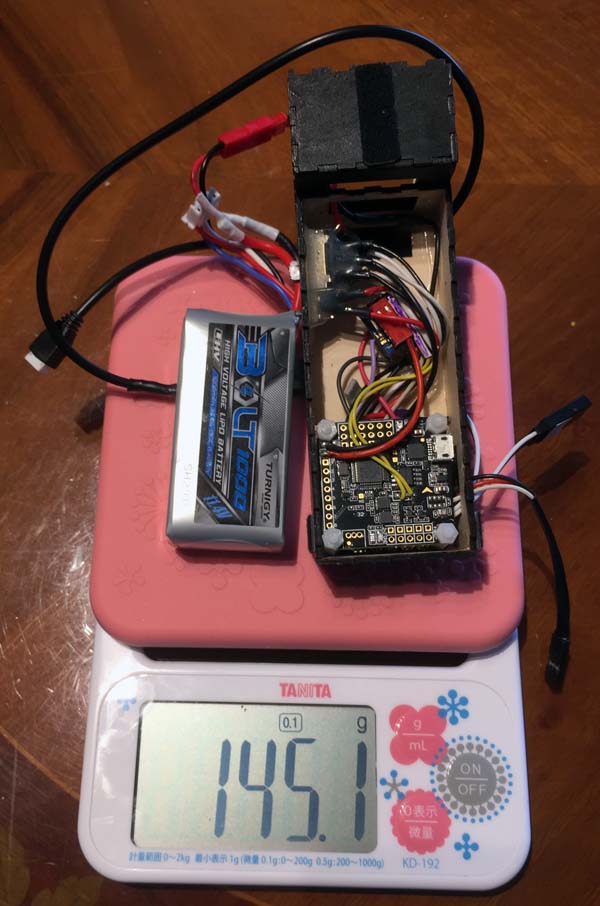
⑦ バッテリー:inspire1のサイズに合って軽量のもの(実測値93.5g)
(1)Turnigy Bolt 1000mAh 3S(11.4V) 65C ハイボルテージ リポバッテリー
⑧ BEC:カメラ2台の電圧がそれぞれ5vと12vのため
(1)ARRIS ミニ配電用の基盤ボード CC3D フライトコントローラ用(5,12V)
⑨ 重さについて
⑩ 飛行テスト
5.8GHz帯無線局の使用許可申請:
アマチュア無線4級は以前にとってあったので(無線局は期限切れ)新たに
以下の送信機について使用許可申請を行った
TS832(32CH)
TS832(40CH)
TS5823(48CH)
-----------------------------------------------------------------------------
(1)jjrc H8DHカメラ&モニターを調べたところ、チップがRTC6705とRX5802だったため、
チャンネルを日本で使用できる5600MHz帯の1つに固定して(はんだ付けして)テスト
したところ、ぴったし!GooDである。モニターは使えそうです。
TS832送信機からの受信もOKでした。
受信側モニター内部の画像
送信側カメラ内部の画像
(2)Feelworld PVR733 7" Wireless 5.8G
受信チャンネルはサーチする




/******************** OSD HARDWARE settings *********************/ //Choose ONLY ONE option: #define MINIMOSD #define CLEANFLIGHT /******************** CONTROLLER SOFTWARE *********************/ #define ROTORCRAFT /******************** Serial speed settings *********************/ // Choose ONLY ONE option: #define BAUDRATE 115200 //#define BAUDRATE 57600 //#define BAUDRATE 38400 //#define BAUDRATE 19200 //#define BAUDRATE 9600 /******************** CALLSIGN settings *********************/ #define CALLSIGNINTERVAL 10 // How frequently to display Callsign (in seconds) #define CALLSIGNDURATION 2 // How long to display Callsign (in seconds) /******************** NAZA Settings ************************/ //#define NAZAMODECONTROL #define NAZA_MODE_GPS 1600 #define NAZA_MODE_ATI #define NAZA_MODE_MAN 1400(5)フライトコントローラーの指定が終わったら左上の右向き矢印をクリックしてMW OSDのソフトウェアを





フロントカメラ関連図)
⑩ 飛行テスト
ベランダが狭くまた風があった為、inspire1とはいえ緊張する
・無人航空機の飛行に関する許可・承認済み 2017年 3月1日 至:2018年2月28日:(国土交通省)
★人又は家屋の密集している地域の上空
★目視外飛行
・5.8GHz帯の無線局の許可済み:(総務省)
飛行テスト(D4Sにて撮影)

飛行ムービー(フロントカメラ & Feelworld PVR733モニター録画)
フロントカメラの映像である。スキッドが下りている時は正面の固定カメラ、上がった段階で下のカメラに切り替わる。
OSD要修正箇所:コンパスの値がおかしい => 出さなくする
無線局の表示が出ない => 調整
